
Comme annoncé il y a quelques semaines, les conclusions préliminaires de la commission indépendante mise en place pour comprendre ce qui a conduit à l’échec de la mission lunaire de Roscosmos ont été publiées. échec de Mission russe Luna-25. Comme nous le savons, la mission devait se poser sur le satellite naturel avec un atterrisseur au cours de la deuxième quinzaine d’août, mais en raison d’un problème technique, le vaisseau spatial s’est écrasé à la surface.
Les causes ont d’abord été attribuées au fait que les propulseurs de manœuvre ont été activés plus longtemps que prévu. Cela a entraîné une modification de l’orbite qui a conduit à la destruction de l’atterrisseur. Dans les semaines qui ont suivi, des éclaircissements ont commencé à être apportés sur les causes, liant l’allumage prolongé des moteurs aux accéléromètres, qui auraient mal fonctionné. Roscosmos a ajouté des détails supplémentaires.
Mission Moon-25 : Roscosmos explique les raisons de l’échec
Selon les informations diffusées sur le canal Telegram officiel de l’agence spatiale et l’agence de presse TASS, le problème est complexe et lié à un traitement incorrect des données envoyées par les différents capteurs. Selon les déclarations officielles, le Sonde lunaire robotisée russe Luna-25 aurait rencontré un fonctionnement anormal du système de contrôle embarqué.
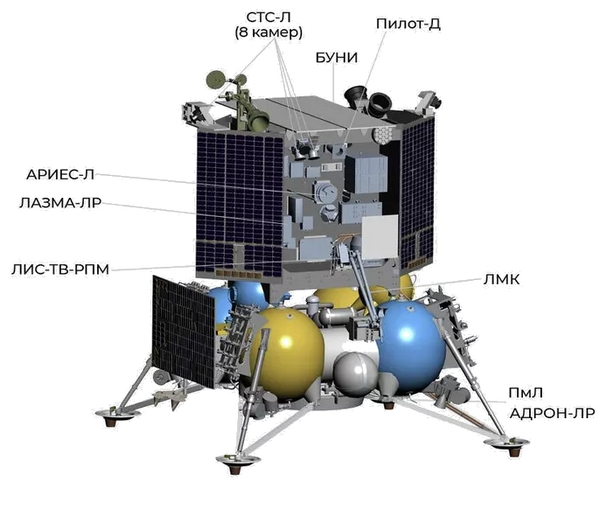
La note de Roscosmos poursuit en déclarant que « il a été établi que Luna-25 s’est très probablement écrasé en raison d’un fonctionnement anormal du système de contrôle embarqué résultant d’une défaillance de l’accéléromètre du dispositif BIUS-L (l’instrument de mesure de la vitesse angulaire) après que des commandes ayant des priorités d’exécution différentes ont été introduites dans un ensemble de données »..
Il ajoute que la distribution des paquets de données envoyés par les différents capteurs (y compris les accéléromètres) s’est faite de manière causale, sans attribution de priorité/importance aux unités de calcul, ce qui donne dans ce cas des valeurs « 0 » pour les accéléromètres. Il est évident que cela ne correspondait pas aux données réelles, mais le système l’a considéré comme vrai, et a donc continué à activer les propulseurs (pour 127″ au lieu des 84″ programmés).

Ce problème a rendu impossible l’enregistrement de l’atteinte de la vitesse requise et l’arrêt des moteurs. Ceux-ci ont été coupés par une autre commande, mais lorsqu’il était trop tard pour changer d’orbite et éviter le crash du Luna-25. Des mesures correctives seront prises pour éviter que de futures missions de Roscosmos vers le Lune (Luna-26, Luna-27 et Luna-28) pourraient connaître des problèmes similaires. L’échec de la mission pourrait toutefois avoir envenimé les relations avec le principal partenaire, la Chine (par l’intermédiaire de la CMSA et de la CNSA), et suscité des doutes quant à la collaboration sur la base de recherche internationale.



