L’équipe de robotique de Google, DeepMind, a publié
;
d’importantes mises à jour technologiques qui lui permettront de progresser vers la création de robots capables de s’intégrer dans la vie quotidienne ;
de progresser vers la création de robots capables de s’intégrer dans la vie quotidienne et de faire des progrès plus rapides ;
la vie quotidienne et leur permettre de faire des recherches plus rapides et plus efficaces ;
et plus efficaces. L’aspect clé de ces innovations, un en particulier,
la volonté d’assurer la sécurité des personnes par une plus grande
conscience et la compréhension du contexte par les robots
et un ensemble de « règles de base » que Google appelle la « Constitution du
robot ».
AutoRT, modèle d’apprentissage et de formation avec une « Constitution
du robot »
La première de ces nouveautés est AutoRT,
un système qui exploite des modèles d’IA à grande échelle qui
;
représentent un élément fondamental pour la création de robots qui
sont capables de comprendre des objectifs pratiques typiquement « humains ». AutoRT
combine de grands modèles tels que le modèle de langage large ou le modèle de langage visuel (Visual Language Model) et un modèle de contrôle de robot ;
Modèle de langage et un modèle de contrôle de robot (tels que les modèles
RT-1 ou RT-2 développés par Google, qui apprennent des notions à la fois à partir du web et
directement des robots et traduisent ces notions en instructions généralisées pour le contrôle des robots) ;
instructions généralisées pour le contrôle des robots) pour créer un système capable
de déployer et de diriger simultanément une série de robots, également équipés
de caméras et d’actionneurs, qui recueillir des données d’entraînement dans
nouveaux environnements. De cette manière, un VLM est utilisé pour chaque robot
VLM pour la compréhension de son environnement et un LLM pour les
tâches possibles que le robot pourrait être appelé à effectuer, telles que
par exemple « mettre le café sur le bureau ».
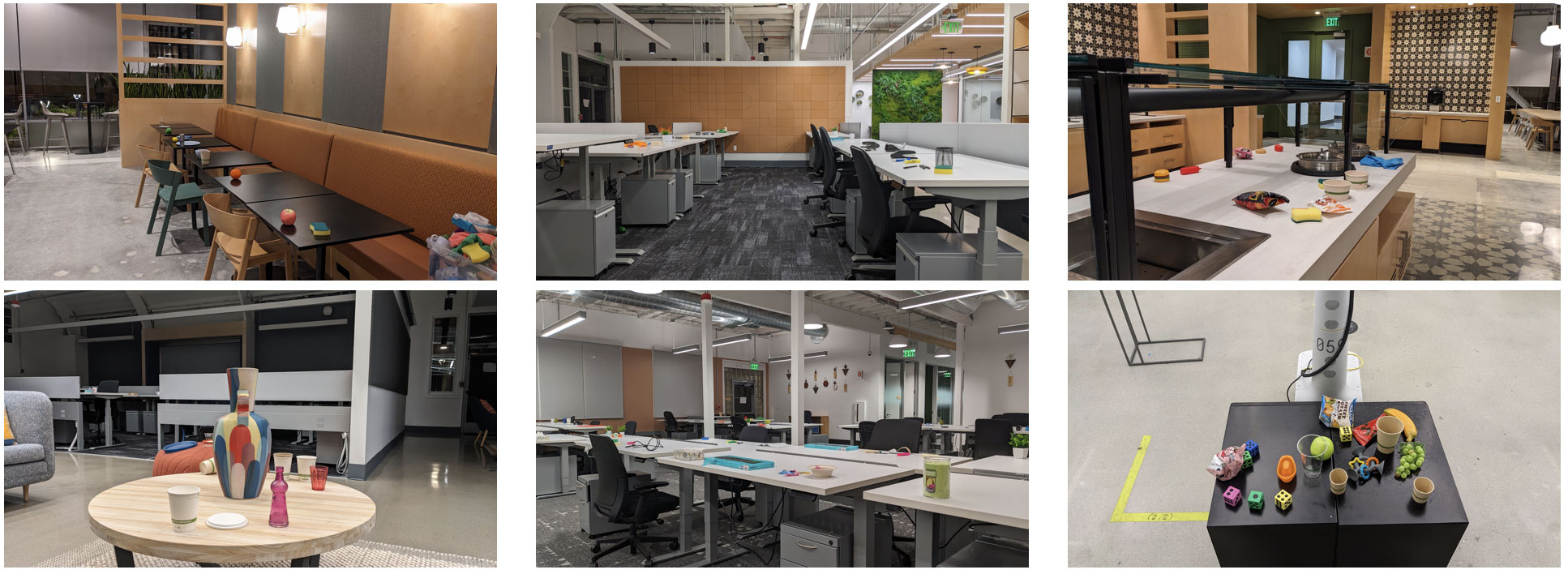
Les différents environnements de test d’Auto-RT
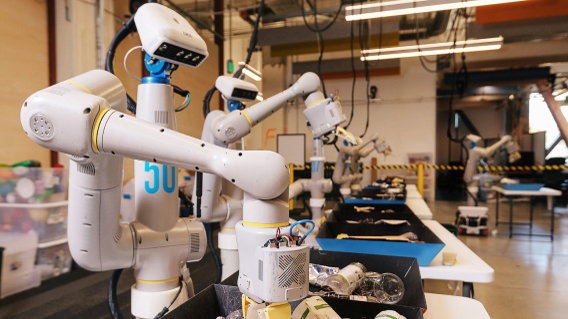
DeepMind a mené une étude approfondie phase d’expérimentation qui a duré
sept moisau cours de laquelle le système s’est avéré capable de coordonner en toute sécurité jusqu’à 20 robots simultanément et jusqu’à 52 robots uniques
;
en toute sécurité jusqu’à 20 robots simultanément et jusqu’à 52 robots uniques
;
au total, dans une variété de scénarios au sein de l’entreprise
en recueillant un ensemble de données diverses de 77 000 essais
robots dans plus de 6600 activités uniques.
AutoRT est actuellement un « simple » système de collecte de données, mais
également une première démonstration de la manière dont les robots
robots autonomes peuvent être intégrés dans le monde réel. Pour que cela puisse se faire à grande échelle et dans la vie de tous les jours, il est essentiel que les robots soient capables de travailler ensemble ;
à grande échelle et dans la vie de tous les jours, il est essentiel qu’ils soient développés
de manière responsable et sur la base de recherches solides qui prouvent leur
sécurité lorsqu’ils entrent en contact avec des êtres humains.
Lorsqu’il s’agit d’interaction homme-robot, les fans de
de science-fiction ne peuvent s’empêcher de penser au trois lois de
de la robotique élaborées par Isaac Asimov dans ses nouvelles et romans qui
mettent en scène les célèbres robots positroniques. Il s’agit de trois
;
qui, dans l’univers de science-fiction créé par Asimov, sont
codées dans le « cerveau positronique » des robots et qui représentent des le
fondement de leur comportement et de leurs interactions avec les humains:
- Un robot ne peut pas nuire à un être humain et ne peut pas non plus permettre qu’un être humain soit blessé à la suite de sa non-intervention ;
un être humain d’être blessé du fait de sa non-intervention. - Un robot doit obéir aux ordres donnés par les humains,
à condition que ces ordres ne contreviennent pas à la première loi. - Un robot doit protéger sa propre existence, à condition que cette sauvegarde n’entre pas en conflit avec la première ou la deuxième loi ;
n’entre pas en conflit avec la première ou la deuxième loi.
C’est (aussi) en s’inspirant de ces trois lois que l’équipe de robotique
de Google Deep Mind a eu l’idée de créer une sorte de « Constitution
du robot »c’est-à-dire un ensemble d’instructions axées sur la sécurité
auxquelles AutoRT doit se conformer lorsqu’il choisit des tâches pour les robots, telles que par exemple, l’interdiction d’effectuer des activités qui impliquent directement le travail d’une personne ;
par exemple, l’interdiction d’effectuer des activités qui impliquent directement des êtres humains, des animaux, des objets tranchants ou des appareils électriques
;
des êtres humains, des animaux, des objets tranchants ou des appareils électriques
des appareils électriques. Il existe également des mesures de sécurité issues de la robotique
la robotique « traditionnelle », c’est-à-dire celle qui est déjà largement utilisée dans les grandes entreprises manufacturières ;
les grandes entreprises manufacturières, telles que le verrouillage automatique des robots
si la force exercée sur leurs articulations dépasse une certaine valeur
Par ailleurs, dans l’expérience menée par l’équipe de Google, tous les robots
étaient maintenus en contact visuel avec un superviseur humain équipé d’un
d’un interrupteur.
SARA-RT, plus d’efficacité pour les modèles de contrôle robotique
La deuxième nouveauté présentée par l’équipe DeepMind s’appelle Self-Adaptive
Robust Attention for Robotics Transformers, ou SARA-RTqui
fait plus efficace que les modèles actuels de transformateurs Robotics que
Google utilise dans les derniers systèmes de contrôle robotique. L’utilisation
de SARA-RT a montré une augmentation de 10,6 % de la précision et une
14 % plus rapide que les modèles RT-2 après avoir été soumis à une courte collection d’images spécifiques ;
soumis à une courte collection d’images spécifiques.
Les modèles de transformateurs sont puissants mais nécessitent une disponibilité de
puissance de calcul qui pourrait ralentir le processus de prise de décision. Ils
Ce sont des modèles de complexité quadratique où l’augmentation de l’entrée
impose une augmentation quadratique de la capacité de calcul : si l’entrée
double, la capacité de calcul doit être multipliée par quatre pour
maintenir la même performance, ce qui peut en fait ralentir le processus de prise de décision ;
processus de prise de décision.
Avec SARA-RT, les chercheurs de DeepMind ont pu utiliser une nouvelle
méthode de réglage, baptisée « up-training », qui réussit à convertir
complexité quadratique en complexité linéaire, ce qui va
augmenter la vitesse du modèle original, tout en préservant la qualité du modèle original
qualité du modèle original. Les chercheurs estiment que SARA-RT représente le premier
mécanisme d’attention évolutif capable d’apporter des améliorations
des améliorations de calcul sans perte de qualité, avec la possibilité d’être
appliqué à une grande variété de modèles de transformateurs d’une manière très
de transformateurs d’une manière très simple et sans nécessiter de code supplémentaire.
RT-Trajectory, trajectoires bidimensionnelles pour les tâches d’apprentissage
généralisé
Enfin, les chercheurs de DeepMind ont présenté RT-Trajectory,
un modèle qui ajoute des contours visuels bidimensionnels décrivant les mouvements et les appendices du robot dans les vidéos d’entraînement ;
mouvements et les appendices du robot dans les vidéos d’entraînement. Le modèle
capture chaque vidéo dans un ensemble de données d’entraînement et superpose,
par exemple, la trajectoire du bras robotique lors de l’exécution d’une
certaine activitételle que le nettoyage d’un sol, par exemple ;
qui est une activité intuitive pour un être humain mais qu’un robot pourrait traduire de différentes manières ;
Un robot pourrait la traduire de nombreuses manières différentes.
Dans la pratique traditionnelle, la formation d’un appareil orthopédique robotisé suit une
;
qui traduit le langage naturel abstrait « essuyer la table » en
une séquence de mouvements spécifiques, ce qui rend difficile la généralisation des modèles à de nouvelles tâches.
difficile pour les modèles de s’adapter à de nouvelles tâches. Les tracés en
de RT-Trajectory représentent une série de suggestions
visuels pratiques de bas niveau qui sont utiles au modèle lorsqu’il apprend les politiques de contrôle du robot ;
politiques de contrôle du robot. En d’autres termes, un modèle tel que
RT-Trajectory permet aux modèles RT de comprendre comment effectuer les
activités en interprétant les mouvements du robot dans la vidéo..
Les chercheurs ont testé RT-Trajectory sur 41 tâches qui n’étaient pas présentes dans les données de formation ;
données d’entraînement et ont constaté qu’un bras robotique contrôlé par ce modèle affichait des performances plus de deux fois supérieures à celles des modèles existants ;
ce modèle était plus de deux fois plus performant que les modèles existants ;
modèles de RT existants, atteignant un taux de réussite dans l’exécution de la
de 63 %, contre 29 % pour le modèle RT-2.b
Une autre capacité intéressante du modèle RT-Trajectory, qui peut être
qui peut être facilement adapté à différentes plates-formes robotiques, est la possibilité de créer des pistes et des trajectoires en observant un être humain en train d’exécuter
; des mouvements ;
créer des pistes et des trajectoires en observant un être humain effectuant
l’action souhaitée, ou même à partir de croquis et d’esquisses dessinés à la main ;
croquis dessinés à la main.
Il faudra probablement attendre encore un certain temps avant de voir dans la vie de tous les jours des [
 ;]robots capables d’effectuer diverses tâches triviales pour les humains ;
des robots de tous les jours capables d’effectuer diverses tâches triviales pour l’homme ;
banales pour l’homme, ou même de véritables robots majordomes. Mais ce que Google
dévoilé ces jours-ci peut à juste titre être considéré
comme des éléments fondamentaux pour le développement et la réalisation de systèmes robotiques plus complexes ;
de systèmes robotiques plus complexes capables d’assister les êtres humains
dans leurs activités professionnelles et personnelles.



